Published on 2024-01-31 by avile040
Introduction
In the middle of 2022, the first quadruped was tested on an uneven road and the performance was not up to par with what was expected due to the legs not being strong enough struggling to get up at times. To solve this a more robust brushless robot dog was thought of but to make the control systems work for it a mock dog aka Red Dog was developed to test the capabilities of the Chvmp motion control algorithm.
Constructing the Red Dog Quadruped
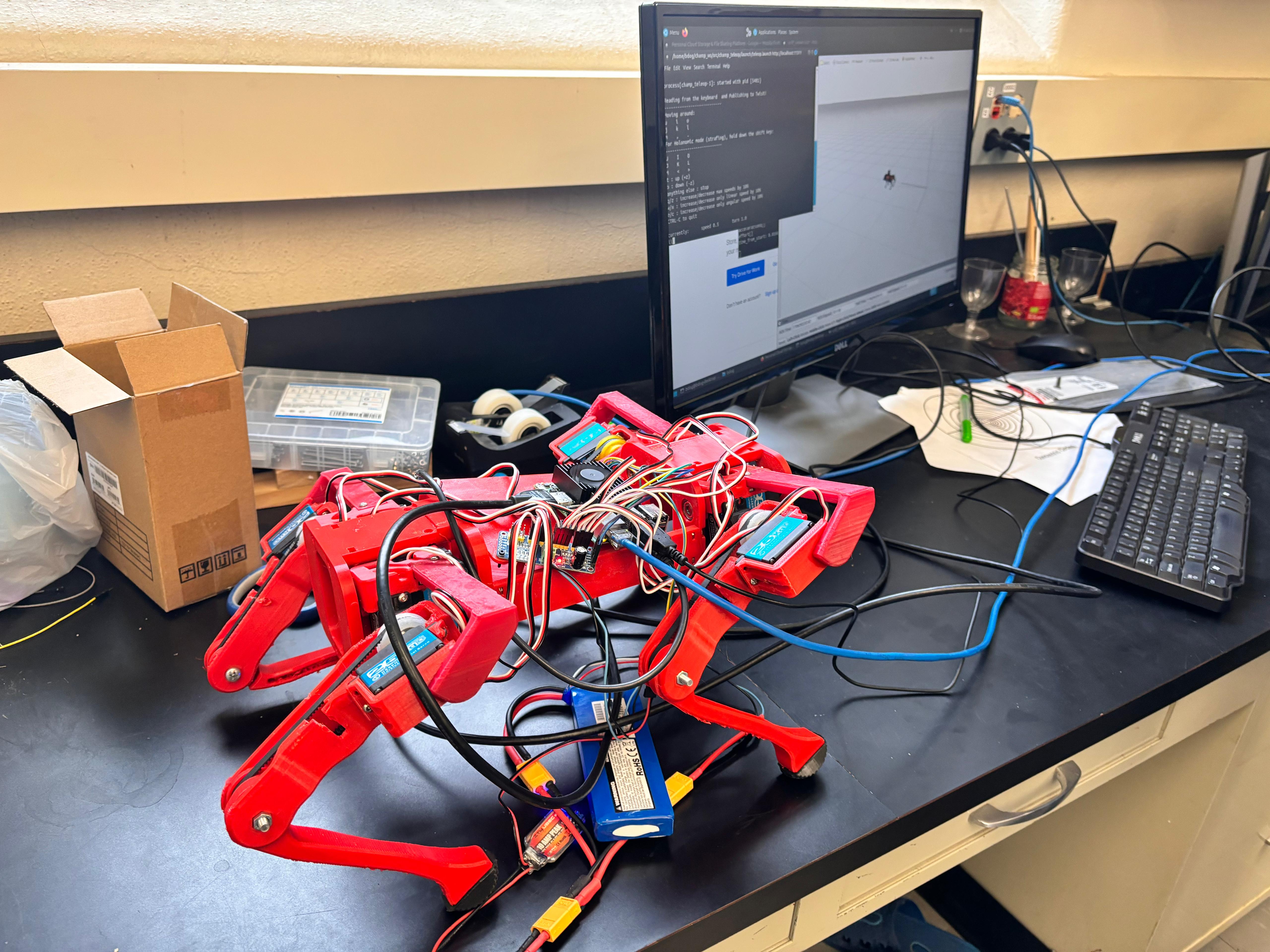
The Red Dog uses the body from an open-source quadruped named OpenQuadruped, a 12 DOF robot similar to the first quadruped. The new body has some upgrades such as placing the servos at the shoulder rather than having them on the bottom leg, this eases the motion of the lower leg. The same concept was used on the Spot from Boston Dynamics and the mini cheetah the lower legs are connected to the shoulder with a belt.
Materials & Components:
Body: 3D printed with PETG filament, the material was chosen for its superior durability and UV resistance compared to traditional PLA filament.
Gears: 3D printed with Nylon 66 filament to ensure a long-lasting pulley.
Soles: 3D printed from TPU flexible filament for an enhanced surface grip.
Motors: DS3225 25KG coreless servo motors
Control System: A PCA9685 I2C bus controller connected the servos, with a Raspberry Pi 4B serving as the main control unit. The Pi ran Ubuntu 18.04 with Melodic ROS, leveraging libraries from GitHub chvmp and OpenQuadruped repository. Chvmp provided with the motion algorithm and the OpenQuadruped gave the body design
Calibration Process
The calibration process for the Red dog was easier than with the previous quadruped as now we had more experience doing it and the chvmp software was easier to calibrate as it allowed us to set zero positions making it easier to control them another factor that made them easier to calibrate was the 270 degrees of the servo, with the increased motion it wasn't limited in motion. Calibration involved having the motors to enter a rest state and adjust as needed.
Challenges & Solutions
Leg Movement: Due to the quality of the shoulder pulley that controls the lower leg the teeth on the pulley were not perfectly made as the 3D printer could not recreate perfect teeth. Due to that, the lower leg skipped gears even when the belt was tensioned extremely tight.
Servo Power: Servo power was similar to the previous quadruped dog.
Conclusion
The Red Dog gait and servo motor control was great but it had physical difficulties that limited its potential. It did serve as a platform to prove that the chvmp motion control software is capable of running on a quadruped with motion gaits. Using the knowledge learned from the Red dog with Chvmp it can be integrated when building the brushless dog platform which will have stronger brushless motors and metal pulleys with stronger belts.
References
GitHub - chvmp/champ. GitHub. (2022). Retrieved from https://github.com/chvmp/champ
GitHub - adham-elarabawy/open-quadruped. GitHub. (2022). Retrieved from https://https://github.com/adham-elarabawy/open-quadruped